
Dear Tech Artist Community,
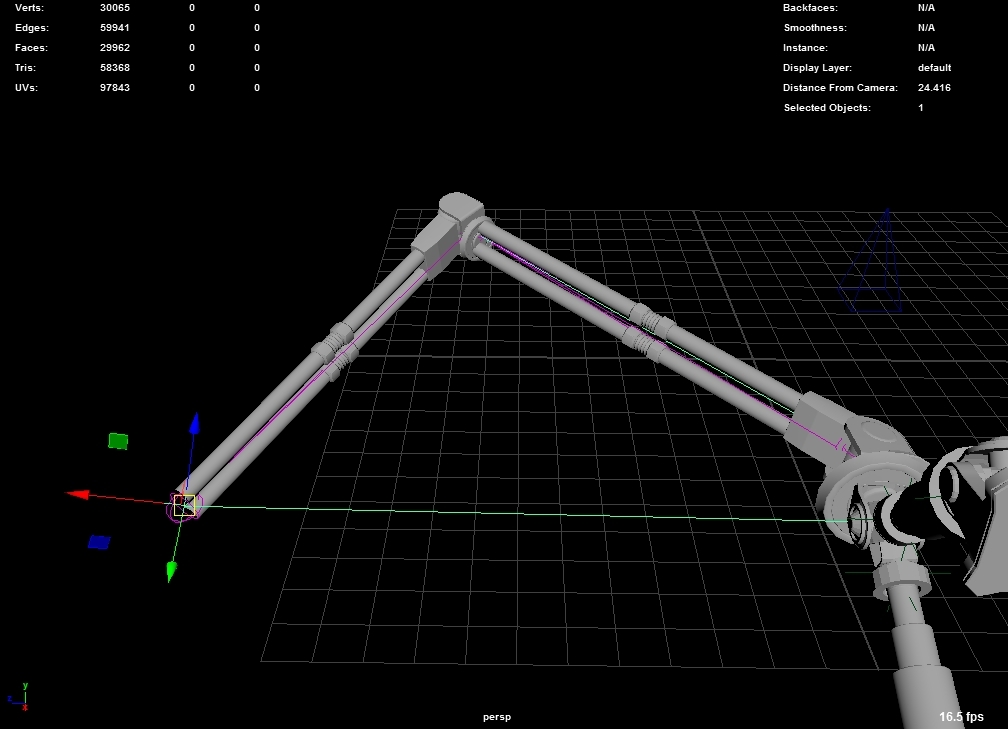
I’m trying to create an IK control for a robot arm that has two motors for each joint: One for the twisting and one for the bending.
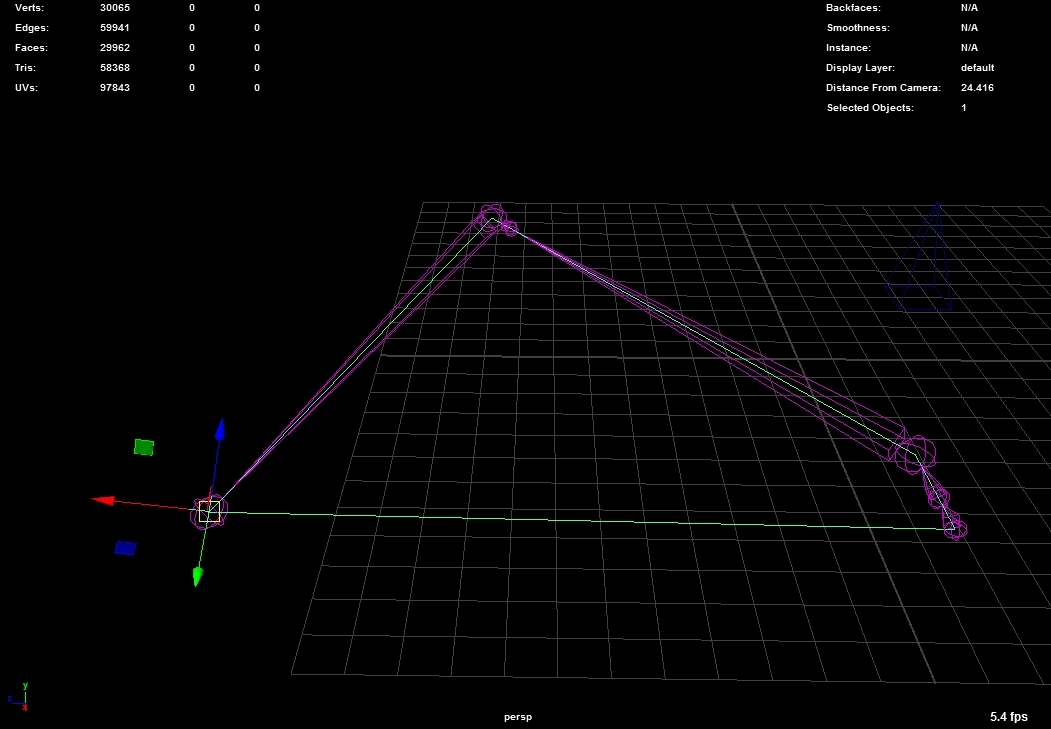
So I created the chain with joints for each motor and restricted the “Degree of Freedom” to what they are allowed to do.
The regular Rotate Plane Solver fails.
The Multi Chain IK solver does a good job. Only with the not really acceptable limitation that doing something like a pole vector constraint type control for the orientation of the elbow doesn’t seem possible.
So the question is: Is there a way to use the ikMC Solver + a pole vector type control? Or… a completely different way of rigging this?
Thanks!