Hi all,
let’s asume i have an image i want to calculate the camera angle from at the moment it was shot.
So i draw some lines matching perspective lines in the picture (for each axis) and end up with 3 vanishing points (vp1, vp2, vp3). Now i define a center point © and connect it with the vanishing points. This gives me a graphical 2d representation of a coordinate system…so far so good.
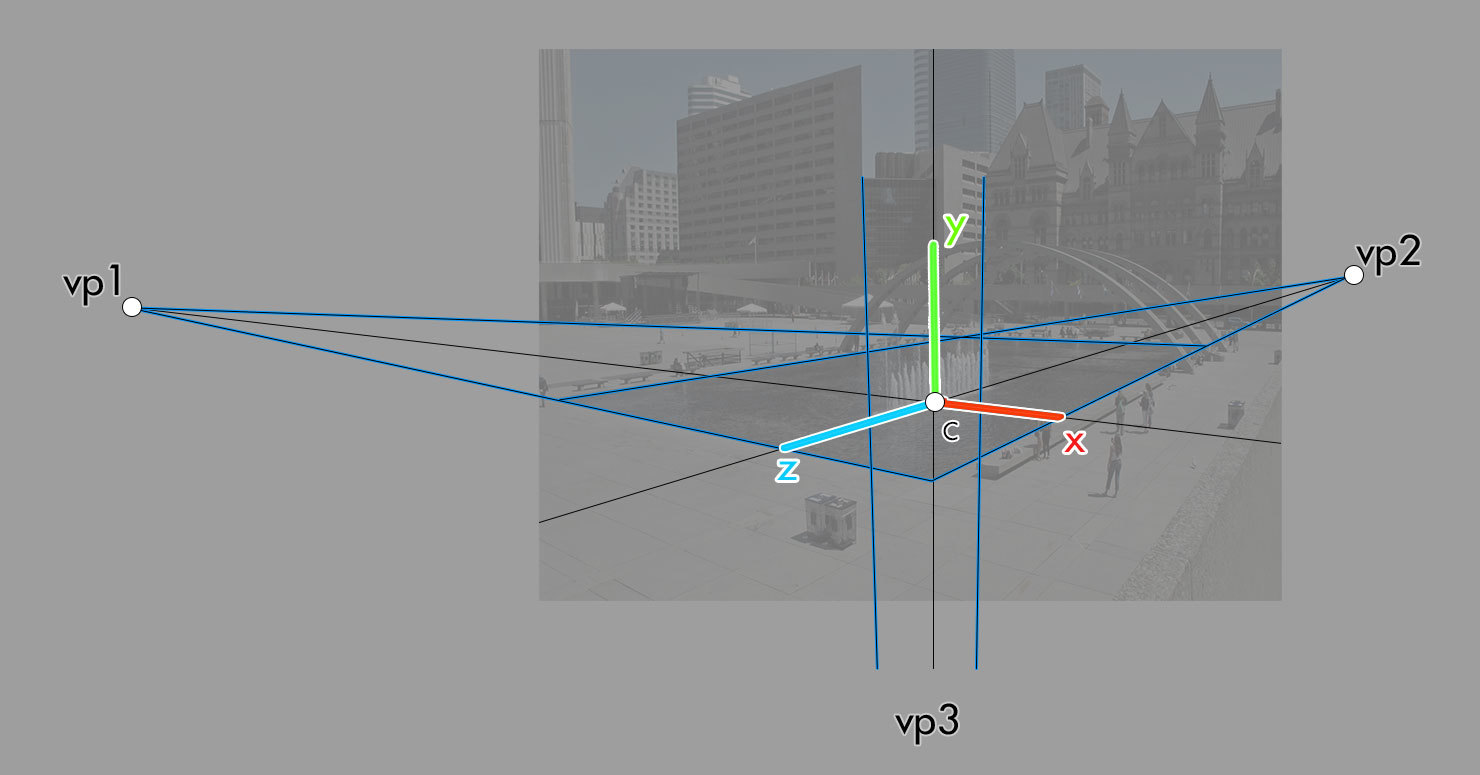
Now the problem: How can i calculate the pitch, yaw and roll of a camera with the given information?
Roll would be the angle between lineA (vp1, vp2) aka horizon and a horizontal line, right? But how do i get pitch and roll?
Thanks in advance
Daniel